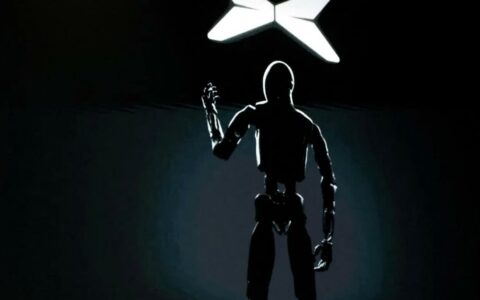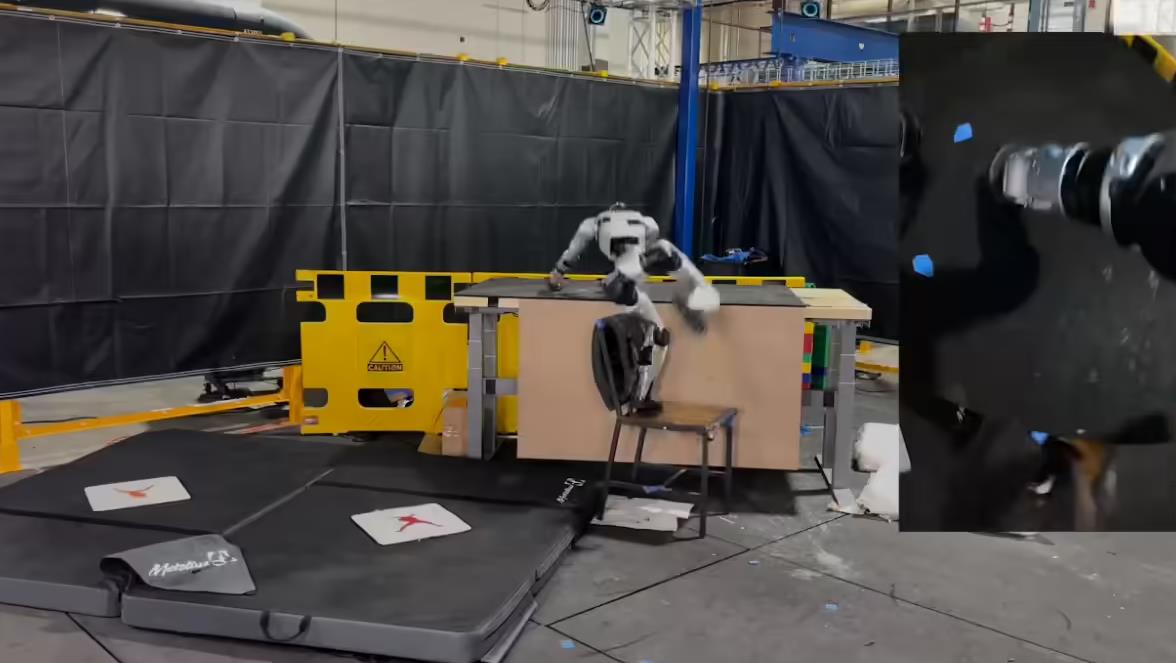
美国亚马逊FAR实验室联合麻省理工、加州大学伯克利分校、斯坦福大学和卡内基梅隆大学的研究团队本周公布了革命性成果——OmniRetarget交互保留数据生成引擎。这一技术使宇树G1人形机器人能够仅凭本体感觉完成复杂动作序列,无需依赖视觉或激光雷达系统。在演示视频中,机器人不仅能够搬动椅子作为踏板爬上桌子,还能执行跑酷式的翻滚动作缓冲落地,展现了惊人的运动能力。
OmniRetarget的核心创新在于其交互网格技术,该引擎精确建模并保留了机器人、地形与被操作物体之间的空间和接触关系。通过最小化人类与机器人运动网格间的变形差异,同时严格满足运动学约束,系统能生成符合物理规律的动作轨迹。研究团队通过多数据集验证,生成了超过9小时的高质量轨迹数据,在动作可行性和接触稳定性方面显著优于传统方法。
这一突破性进展使机器人仅需5个奖励参数和简单的环境随机化训练,就能掌握长达30秒的复杂动作序列。除演示的爬桌、翻滚动作外,系统还能支持8种不同风格的物品搬运方式。研究团队表示,这种纯本体感觉驱动的控制策略,在视觉传感器失效的极端环境下具有重要应用价值,为未来人形机器人在救灾、探险等场景的实用化铺平了道路。
原创文章,作者:秋秋,如若转载,请注明出处:https://www.kejixun.co/article/735461.html