宇树
-
宇树开源 UnifoLM-VLA-0 大模型,助力通用人形机器人操作
1月30日,宇树宣布开源 UnifoLM-VLA-0 大模型。据介绍,该模型是 UnifoLM 系列下面向通用人形机器人操作的视觉-语言-动作(VLA)大模型,旨在突破传统 VLM…
-
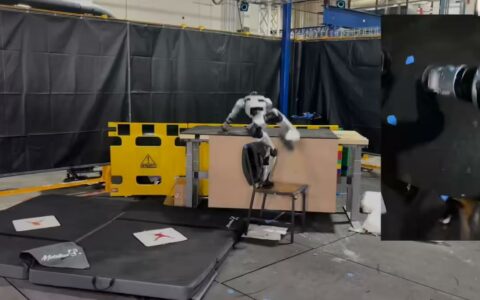
人形机器人新突破:宇树G1实现复杂动作仅靠本体感觉驱动
美国亚马逊FAR实验室联合麻省理工、加州大学伯克利分校、斯坦福大学和卡内基梅隆大学的研究团队本周公布了革命性成果——OmniRetarget交互保留数据生成引擎。这一技术使宇树G1…